Introduction
In this series of posts, I will be writing up about some work done in the context of a semester project counting for my degree from EPFL. This is meant more as a record than an in-depth tutorial, but don’t hesitate to drop me a line if you would like to see more details. This work was done under supervision by Sylvain Calinon, senior researcher in the Robot Learning & Interaction Group at Idiap Research Institute in Martigny, Switzerland.
The main focus of the project was to investigate new ways of controlling high degree of freedom robots, with an application to the Humanoid robot Baxter.
 Figure 1: The Baxter robot (source: edinburgh-robotics.org)
Figure 1: The Baxter robot (source: edinburgh-robotics.org)
Controlling robots is hard
As robots further enter our everyday lives, increasing our interactions with them, we need better ways to cooperate with or command them. In industrial settings, where the large majority of robots live at the moment, the design of operational tasks and their control is yielded to a dedicated technician or engineer, who often needs extensive experience in the use of a proprietary interface corresponding to the robot in use.
Personal or service robots, which have started to enter our homes, still only enjoy rudimentary control : they usually sacrifice completeness for simplicity as users are usually not well versed in robot control.
 Figure 2: An industrial robot control panel from techtransfer
Figure 2: An industrial robot control panel from techtransfer
In recent years we have seen the arrival of a variety of new Augmented Reality platforms, such as Google’s Tango 1 (now ARCore 2) or Apple’s ARKit 3. Thanks to more powerful embedded hardware, companies have started to provide libraries which easily allow visual tracking, rendering in 3D space, and even interaction with physical planes. This presents an elegant framework for interacting with complex systems such as robots, as they take advantage of context to display information. They also could provide an intuitive way of manipulating robots which have a high number of degrees of freedom, such as the Baxter robot, in the space in which they operate normally, provide direct visual feedback rather than a collection of joysticks or buttons for every DOF.
 Figure 3: ARKit in action
Figure 3: ARKit in action
Towards an intuitive control model
One of the simplest ways of expressing complex shapes has long been to draw. Particularly in the case of human poses, which can be difficult to describe, are intuitively represented with stick figures. The original aim of this project was to allow a user to draw a stick pose on an Augmented Reality interface which would map to a robot pose. This would allow for intuitive control of the robot’s many DOFs by providing direct, contextual and visible feedback to the user controlling it.
An interesting approach to this control is to give and track commands directly in the image space (on the screen). This idea led to the investigation of the visual servoing problem, as detailed in Part 2 (coming soon). This led us to keep this method of control for a final application in which the user could click on the screen of an Android phone, and have the robot move to this selected point.
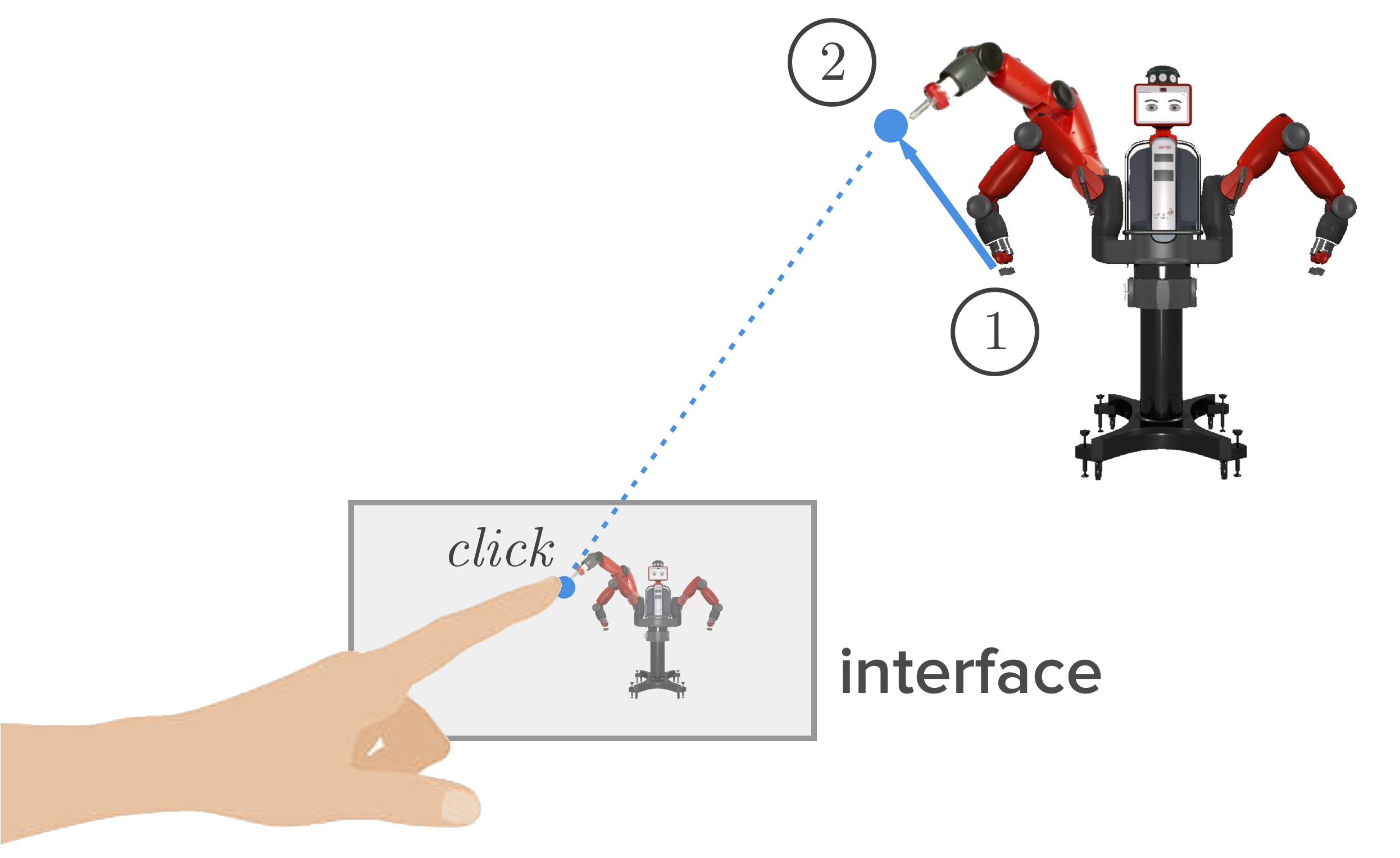
Figure 4: Proposed interaction model
This should converge towards a unified control model described in Fig. 4. The user, helped by feedback from an Augmented Reality overlay, can click on the screen to make the robot’s arm move from position 1 to 2, while having the freedom to move around, edit his selection, and virtually interact with the separate degrees of freedom of the robot.